



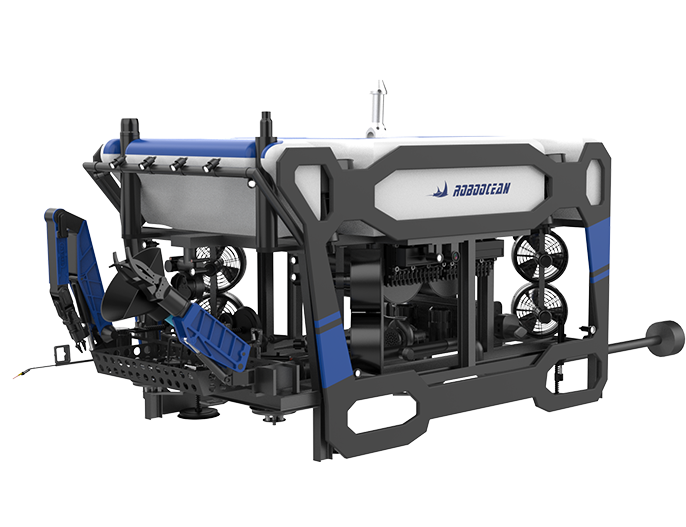













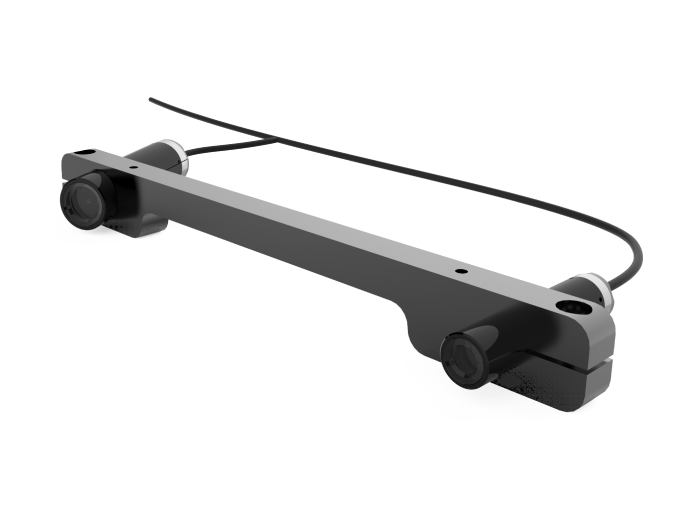






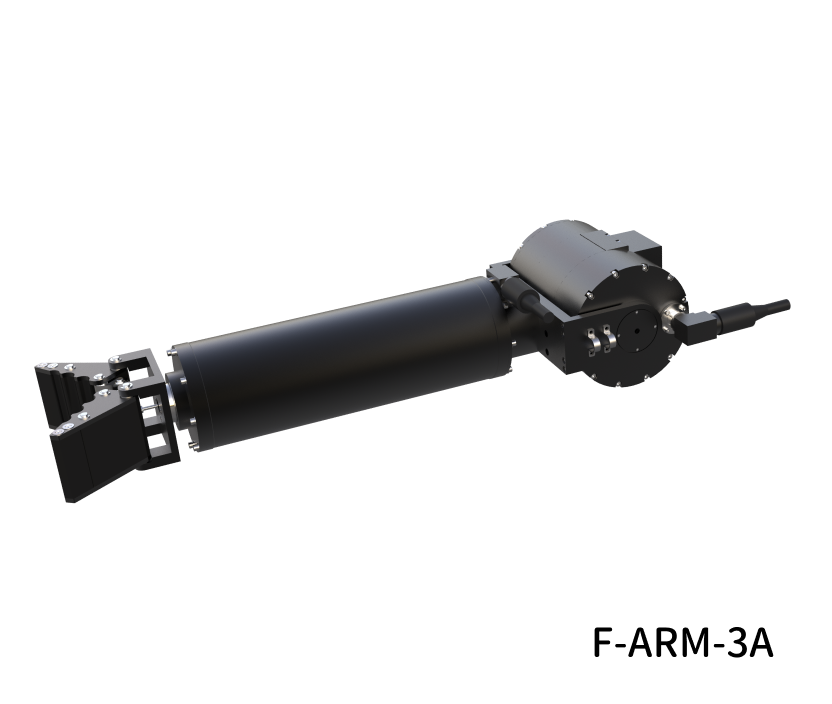


F-ARM機械臂
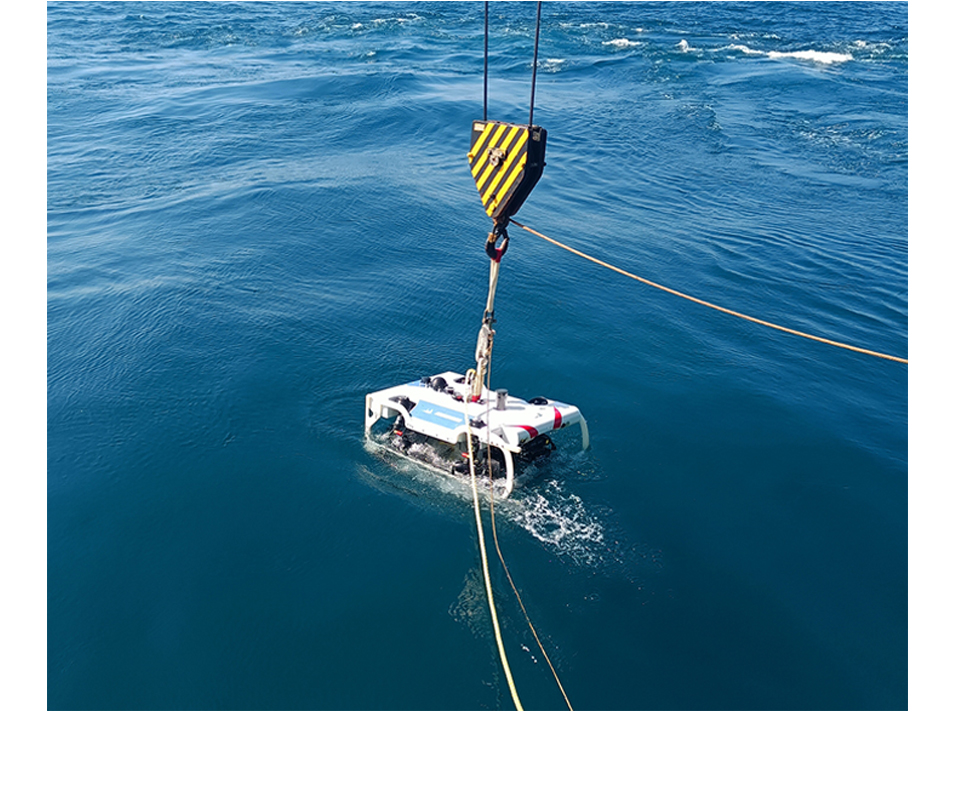
水下機械臂作為水下機器人的主要執(zhí)行部件,其性能精度直接影響著該水下機器人的作業(yè)能力,比如檢測級ROV在執(zhí)行水下剪切、布放、拾取等工作任務時,水下機械手的提升力、穩(wěn)定性等性能指標將直接決定其任務能否成功完成。因此,選擇一款操作精準、穩(wěn)定可靠的水下機械手就變得尤為重要
獲取更多信息請聯(lián)系400-6288-198











聯(lián)系我們

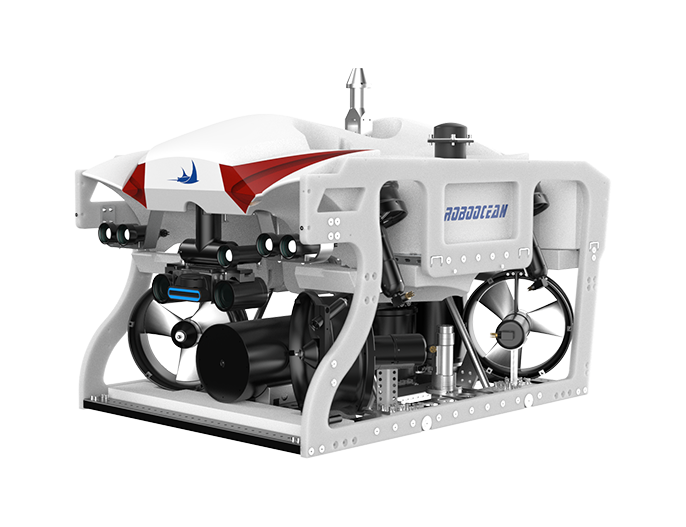
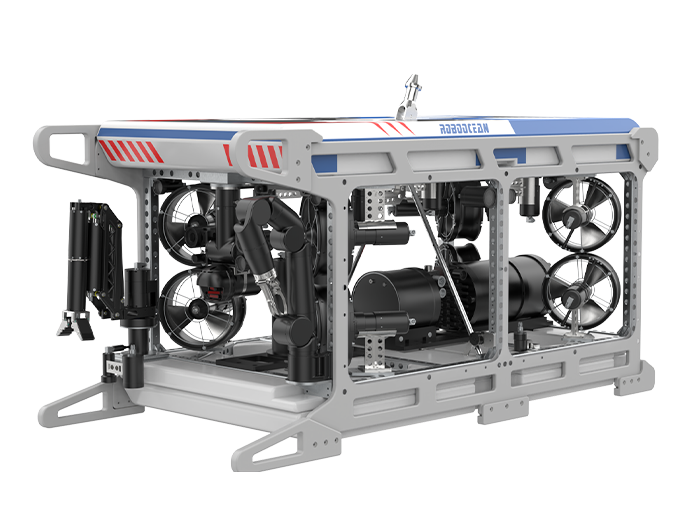
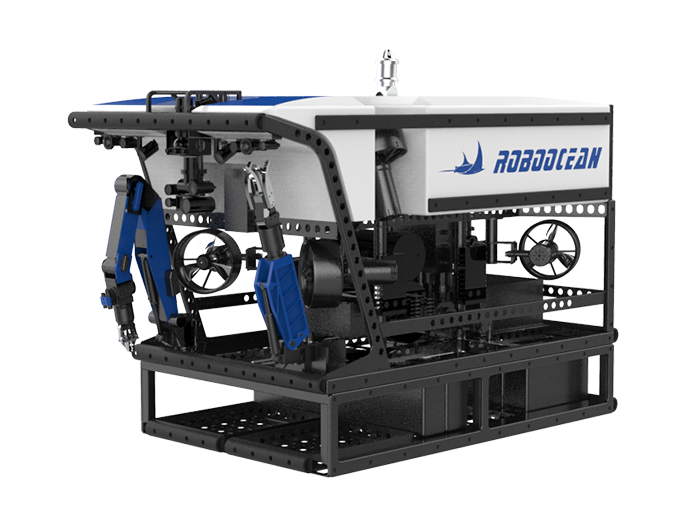
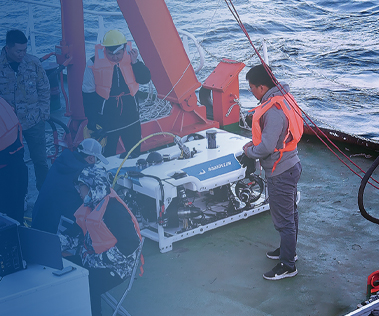
作業(yè)級水下機器人穩(wěn)定性強、載荷大,是海洋作業(yè)的最優(yōu)選擇。可應用于深遠海科學考察、海洋油氣勘探、海上風電運維等領域。
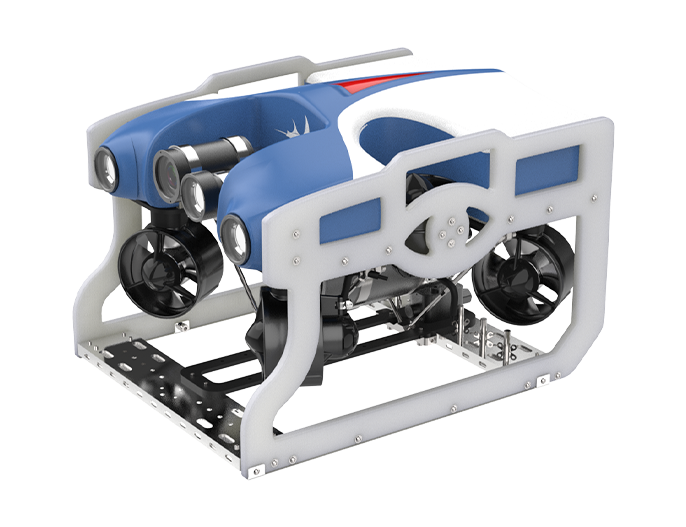
為滿足復雜特殊環(huán)境檢測作業(yè)需求而設計的水下機器人。可以實現(xiàn)爬壁清潔,自主路徑規(guī)劃等功能。主要應用在水電站、水庫、風電場、輸水隧洞等水工設施的檢測清潔。

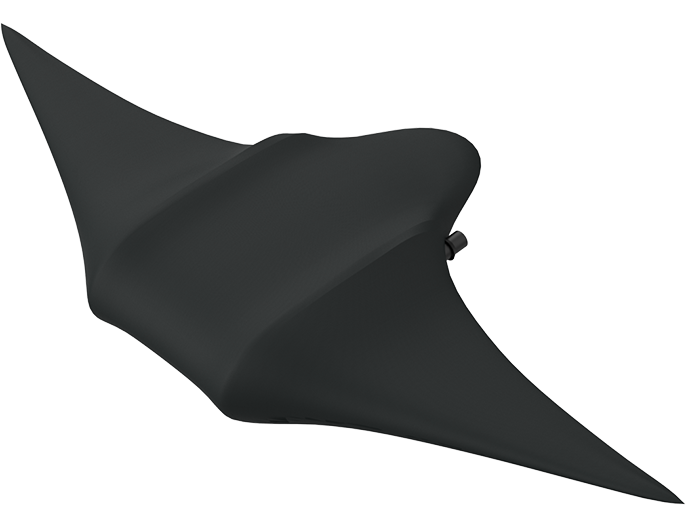
仿生系列產(chǎn)品基于北京大學工學院十多年的研究歷史,采用高速的仿生驅(qū)動系統(tǒng)以及先進的CPG(中樞模式發(fā)生器)控制算法,大幅增強了機器人運動的速度和平穩(wěn)性。

我們將軍工方向的解密技術,投入高等教育領域,與各大高校共同推進水下技術產(chǎn)學研服務平臺建設。在提供水下教學、競賽用機器人的同時,也為學校制定海洋教育整體解決方案。

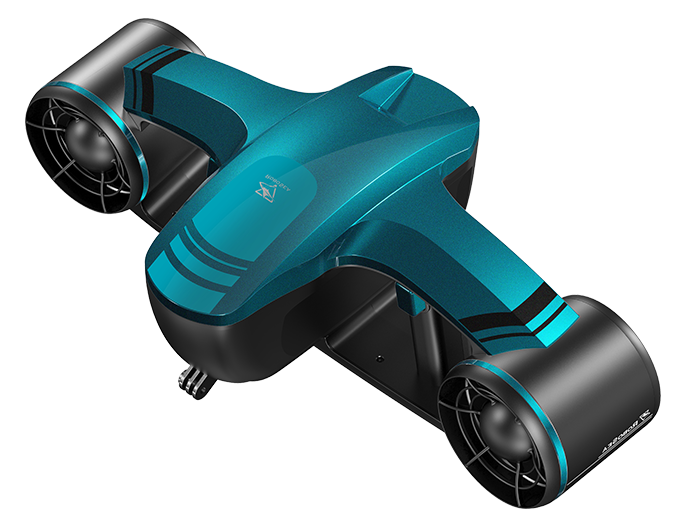
消費級系列產(chǎn)品將水下運動變得簡單、有趣且富有激情。我們不斷進行產(chǎn)品創(chuàng)新和成本優(yōu)化,旨在能夠讓更多人親身體驗到多彩絢爛的水下空間。

水下機械臂作為水下機器人的主要執(zhí)行部件,其性能精度直接影響著該水下機器人的作業(yè)能力,比如檢測級ROV在執(zhí)行水下剪切、布放、拾取等工作任務時,水下機械手的提升力、穩(wěn)定性等性能指標將直接決定其任務能否成功完成。因此,選擇一款操作精準、穩(wěn)定可靠的水下機械手就變得尤為重要

Copyright ? 博雅工道(北京)機器人科技有限公司 ?2022 版權所有
 京公網(wǎng)安備11011202100804 京ICP備19029463號-1 網(wǎng)站建設:尚品中國
京公網(wǎng)安備11011202100804 京ICP備19029463號-1 網(wǎng)站建設:尚品中國
